训练深度网络
本文为阅读 Hands-on Machine Learning with Scikit-Learn, Keras, and TensorFlow 的第 11 章时记录的笔记。
梯度消失 / 梯度爆炸
误差的梯度在反向传播的过程中,变得越来越小,最后近乎消失,这导致网络前面的层的参数得不到更新,无法收敛到最优解。
相反,梯度也可能变得越来越大,在反向传播的过程中,梯度越来越大,靠前的层的参数更新的非常剧烈,模型无法收敛。
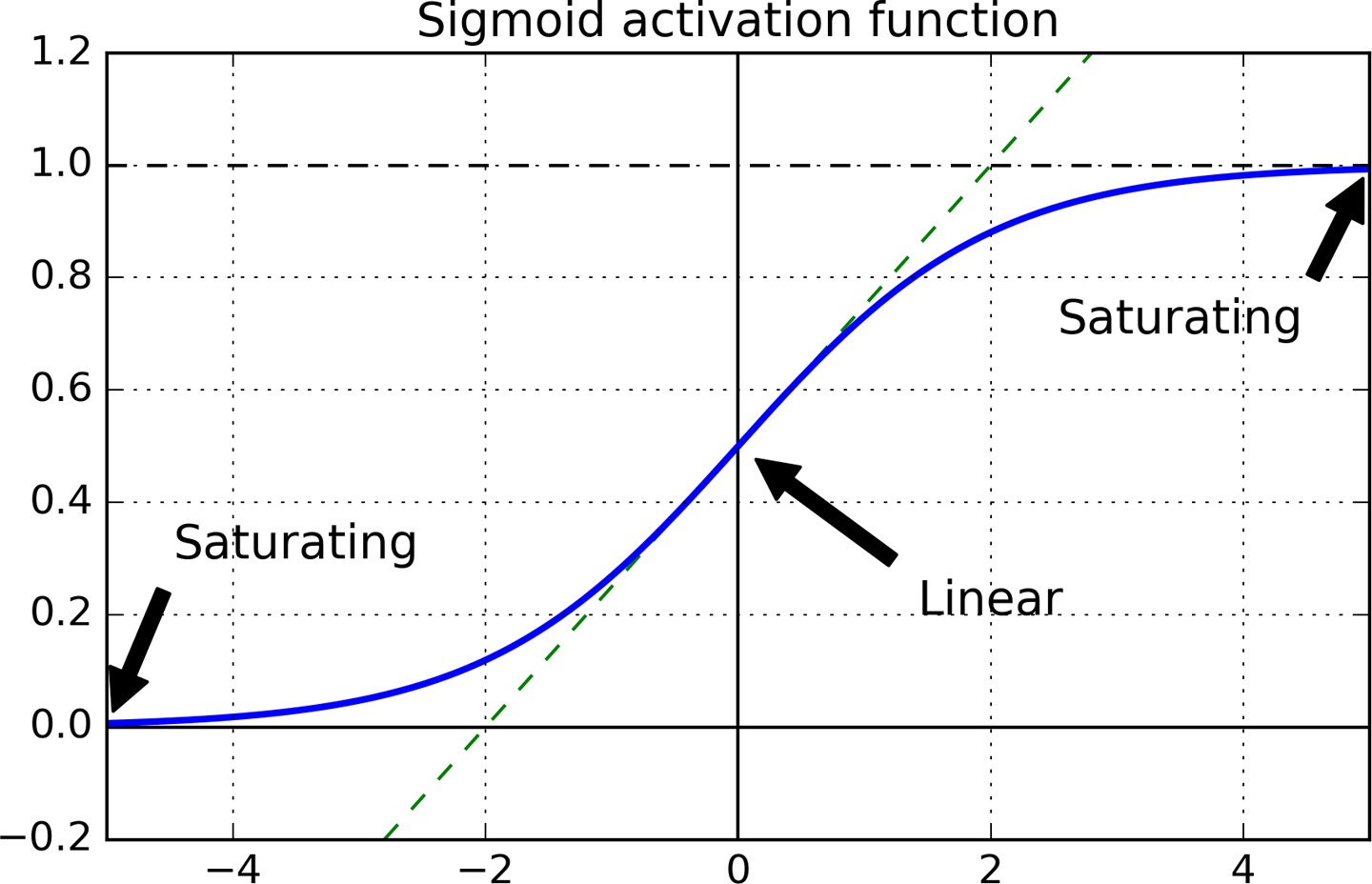
梯度消失的主要原因是使用 sigmoid 作为激活函数。从上图中可以看出,当输入很大或很小时 sigmoid 的函数曲线很平坦,其梯度都接近于 0,梯度最大时也才 0.25, 因此误差在反向传播时,经过激活函数后,梯度会很小。越先前传播梯度越小,导致网络中靠前的层几乎得不到更新。
另外由于 sigmoid 函数输出的均值为 0.5,这导致前向传播时,输入的方差越来越大。
参数初始化
Glorot 和 Bengio 早期的一篇论文 - Understanding the Difficulty of Training Deep Feedforward Neural Networks 指出,网络的输入和输出应该具有相同的方差。
在实践中,人们发现了针对不同激活函数的参数初始化策略。大体思路是将参数随机初始化为均值为 0 的高斯分布,方差的大小则根据激活函数来定。
下表做了总结:
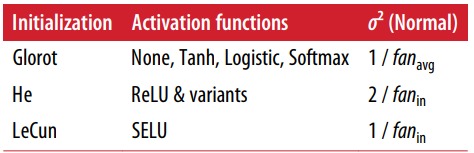
fan_in 指输入的神经元数量,fan_out 为输出神经元数量,fan_avg 自然就输入输出的均值了。
激活函数
ReLUs
ReLUs 激活函数极大地缓解了梯度消失的问题,对于正输入值 ReLUs 不会饱和,且计算起来很快。
但依然存在问题,一旦某个 unit 输出小于 0,那么它之后就只会输出 0,而且梯度也会是 0,即 ReLU 也可能出现梯度消失的问题,此 unit 的权重将得不到更新。这个问题称为 Dead ReLUs。
Leaky ReLU

Leaky ReLU 可以让未激活 unit 在训练中有机会再次激活。
ELU
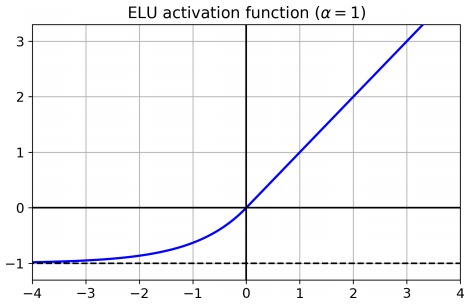
ELU 的特点是,其输出的均值接近为 0,同时再各个位置均可导。其数学定义如下:
Batch Normalization
使用 ReLU 及其变种,加上合适的参数初始化策略,在训练的初期可以很好地消除梯度消失/爆炸的问题,但不能保证在整个训练过程中都不出现梯度消失/爆炸的问题。Batch Normalization 对输入的整个 batch 的数据做标准化,可以持续减缓梯度消失/爆炸的问题。
Batch Normalization 需要调整的参数不多,momentum 用于计算动态调整的均值,它的值应该接近于 1。样本集越大,或者 batch-size 越小时,momentum 应该越接近于 1。在训练过程中需要在用每个 batch 的均值和方差来调整整体的均值和方差,momentum 是用来做平滑的。
如果在输入层之后紧接一个 batch normalization 层,对数据做标准化操作就可以不用显式地完成了。
梯度裁剪
梯度裁剪是限制梯度的大小不超过某个阈值。在 RNN 中梯度裁剪尤其重要,因为 RNN 常常出现梯度爆炸的问题。
optimizer = keras.optimizers.SGD(clipvalue=1.0)
model.compile(loss="mse", optimizer=optimizer)在 keras 中设置梯度裁剪尤其简单,以上代码将限制梯度的绝对值小于 1.0。对梯度的某个分量进行裁剪,会导致梯度方向的改变,比如原梯度为 [100, 1], 裁剪后变为 [1, 1],这极大地改变了梯度方向。要想保证梯度方向不变,可以对梯度的 L2 范数做限制,即限制梯度向量的模长。下面的设置保证梯度的模长不大于 1,否则各个分量都进行缩减,保证梯度方向不变。
optimizer = keras.optimizers.SGD(clipnorm=1.0)优化器
Momentum
基本的梯度下降法,在陡峭的函数平面上,梯度较大,更新较快,在平坦的函数平面上,梯度较小,更新会很缓慢。momentum 引入了动量的概念,在梯度下降时,不仅考虑当前梯度,还考虑之前的梯度。其公式如下:
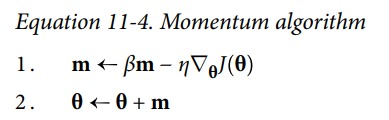
式子中 是动量, 是损失函数的梯度, 是动量的权重, 是学习率。每次更新参数 时,首先更新动量,然后更新参数。
optimizer = keras.optimizers.SGD(lr=0.001, momentum=0.9)Nesterov Accelerated Gradient
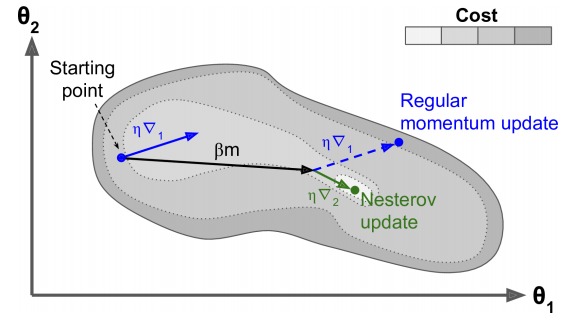
在计算新的梯度时,考虑到已经加入的动量。下图中左边的蓝色短线表示当前的梯度方向,黑色长线是动量,两者之和应该是蓝色的虚线。NAG 的策略是不在当前点计算梯度,而是想用动量走一步,然后在新走的哪一点计算梯度。即在黑线箭头位置计算梯度。
optimizer = keras.optimizers.SGD(lr=0.001, momentum=0.9, nesterov=True)AdaGrad
AdaGrad 是一种自适应学习率的方法,其基本思想是,对于梯度大的方向,学习率小一点,对于梯度小的方向,学习率大一点。其公式如下:
其中 是累计梯度的平方和,在第二个式子中,梯度被除以了 , 是一个很小的数,防止分母为 0。这样,梯度大的方向,分母大,学习率小。梯度小的方向,分母小,学习率大。最终的效果是梯度小的方向,大幅更新。梯度大的方向,小幅度更新。
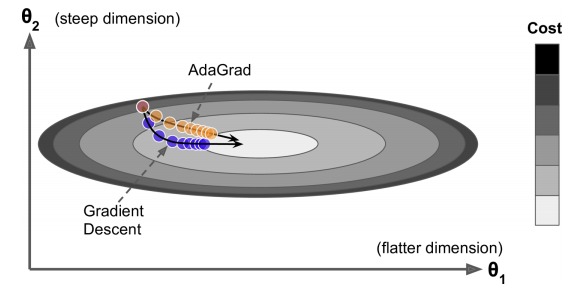
上图中,水平方向较长,较平坦,梯度较小。竖直方向,梯度较大。常规的梯度下降法,会走蓝色路径。而 AdaGrad 会走橙黄色路径。
但是 AdaGrad 不断地对梯度值进行累加,最终导致上面式子中 s 的值过大,更新越来越慢,可能还没有到最优点时,就更新不动了。
RMSProp
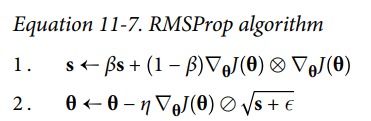
RMSProp 通过引入一个衰退系数,让 s 仅仅累加最近的梯度。
optimizer = keras.optimizers.RMSprop(lr=0.001, rho=0.9)Adam
Adam (adaptive moment estimation) 结合了 Momentum 和 RMSProp 的优点。其公式如下:
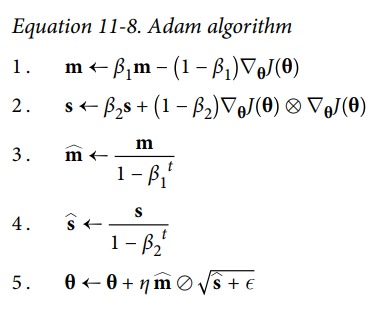
Adam 综合了 RMSProp 和 Momentum。3、4 两个式子中 t 代表的是迭代次数, 和 都小于 1,当迭代次数较小的时候,m 和 s 的值能够被放大,当迭代次数增大是分母也就很接近 1 了,m 和 s 的值就不会在被放大了。这是为了在迭代的初始时,m 和 s 的值为 0,通过这两个式子,可以对初试阶段进行加速。
optimizer = keras.optimizers.Adam(lr=0.001, beta_1=0.9, beta_2=0.999)AdamW
AdamW 是 Adam 加上权重衰减, 在每次更新参数时,都将权重乘以一个衰减系数,从而让权重系数变小,从而避免过拟合。
学习率调整策略
如果学习速率过大,模型会发散,学习速率过小,模型收敛太慢。学习速率稍微大了点,那么最终会在最优解附近震荡。
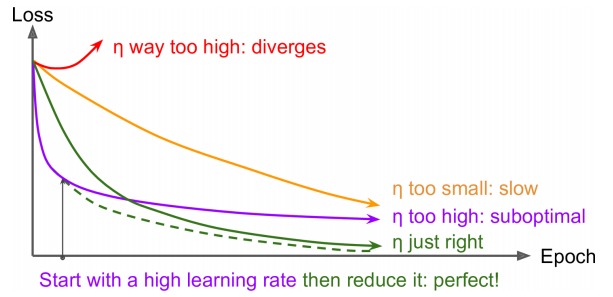
训练的不同阶段,最佳学习率往往不一样,在学习过程中动态的调整学习率,是一个很直觉的想法。常用的学习率挑战策略有下面一些:
Power scheduling
学习率与 step 数成反比,随着参数更新次数的增加,学习速率慢慢降低。具体的更新公式如下:
其中 c 通常为 1,k 为常数,t 是 step 数。可以看到 k steps 之后,学习率减半,2k steps 之后,学习率减小为 1/3。
在 keras 中实现 power scheduling 很容易。
optimizer = keras.optimizers.SGD(lr=0.01, decay=1e-4)decay 是前面式子中,k 的倒数。
Exponential scheduling
每经过 steps,学习率减少为原来的 0.1 倍。
在 Keras 中实现的方法如下:
def exponential_decay_fn(epoch):
return 0.01 * 0.1**(epoch / 20)
lr_scheduler = keras.callbacks.LearningRateScheduler(exponential_decay_fn)
history = model.fit(X_train_scaled, y_train, [...], callbacks=[lr_scheduler])Piecewise constant scheduling
训练的不同阶段使用不同的学习率,实际上就是一个分段函数:
def piecewise_constant_fn(epoch):
if epoch < 5:
return 0.01
elif epoch < 15:
return 0.005
else:
return 0.001Performance scheduling
当验证集上的 loss 不再下降的时候减小学习率。比如 5 个 epoch loss 不降,就把学习率减小一半:
lr_scheduler = keras.callbacks.ReduceLROnPlateau(factor=0.5, patience=5)正则化
L1 L2 正则化
就像训练线性回归模型时那样,也可以给神经网络加入 L1 或 L2 正则化项。
from keras import regularizers
keras.layers.Dense(100, activation="elu",
kernel_initializer="he_normal",
kernel_regularizer=regularizers.l2(0.01))
# L1 regularization
regularizers.l1(0.001)
# L1 and L2 regularization at the same time
regularizers.l1_l2(l1=0.001, l2=0.001)Max-Norm Regularization
一个神经元,其数学表示为 ,max-norm regularization 并不在损失函数中增加正则化项。它限制 的模长,如果 中的某一维度的值过大,那么其模长会变大,限制模长能够从一定程度上限制参数的大小。通常在训练的每一步之后,如果 大于阈值,就对其做调整,调整策略如下:
在 keras 中,可以采用如下代码实现。
keras.layers.Dense(100, activation="elu", kernel_initializer="he_normal",
kernel_constraint=keras.constraints.max_norm(1.))Dropout
原理
在训练过程中随机将输出中的一部分置 0,这让神经元间的彼此依赖减弱。一个类比是,在一个大公司里,每天都随机有一部分员工不来上班,因此每个员工就不得不和更多的同事建立合作,这样公司才能运转下去。
因为有 dropout 的存在,训练阶段,每个 step 都是网络中部分神经元在协作。在测试阶段,所有神经元都一起工作,有种将很多网络集成起来的感觉。
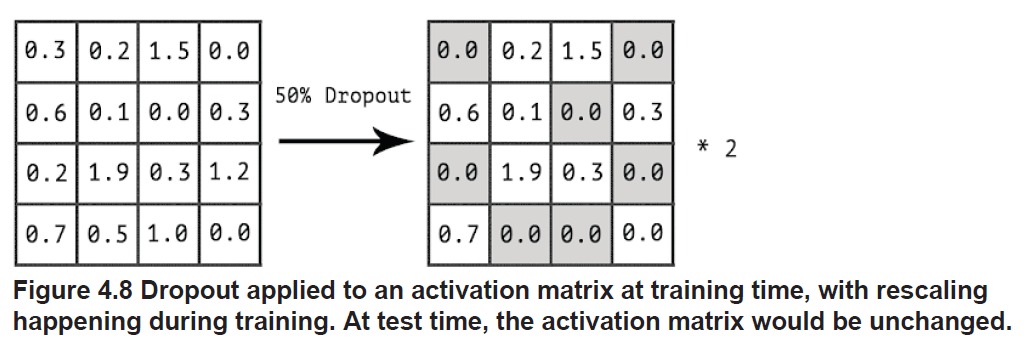
在测试阶段,因为没有 dropout 存在,输出的所有维度都有值,激活函数的输入看起来会大一倍,因此在测试阶段给输出再乘一个 dropout rate,将各个维度的值减小。
还有一种做法,在训练阶段,对输出作了 dropout 之后,将值全部扩大一倍。这样以来,在测试阶段,就不再对输出作任何操作了。
但是这一切在 Keras 中都可以交给 Dropout 来处理。
model = keras.models.Sequential([
keras.layers.Flatten(input_shape=[28, 28]),
keras.layers.Dropout(rate=0.2),
keras.layers.Dense(300, activation="elu", kernel_initializer="he_normal"),
keras.layers.Dropout(rate=0.2),
keras.layers.Dense(100, activation="elu", kernel_initializer="he_normal"),
keras.layers.Dropout(rate=0.2),
keras.layers.Dense(10, activation="softmax")
])Monte-Carlo (MC) Dropout
如果把 Dropout 看做是神经网络的集成,那么在预测的时候,应该是多个模型进行投票。Monte-Carlo Dropout 策略就是在预测阶段,开启 Dropout,然后预测 n 次,n 次的结果进行投票,或者对概率求均值。
with keras.backend.learning_phase_scope(1): # 强制开启 dropout
y_probas = np.stack([model.predict(X_test_scaled)
for sample in range(100)])
y_proba = y_probas.mean(axis=0)采用开启 Dropout 得出的多个结果综合得出预测结果,看起来比关闭 Dropout 后得到单次预测要靠谱。
对一个样本关闭 Dropout 后得出的预测概率如下,看起来对最后一类很确信。
[[0. , 0. , 0. , 0. , 0. , 0. , 0. , 0.01, 0. , 0.99]]而关闭 Dropout 后,进行多次预测,可以看出模型有时候对最后一类并非很确信。
[[[0. , 0. , 0. , 0. , 0. , 0.14, 0. , 0.17, 0. , 0.68]],
[[0. , 0. , 0. , 0. , 0. , 0.16, 0. , 0.2 , 0. , 0.64]],
[[0. , 0. , 0. , 0. , 0. , 0.02, 0. , 0.01, 0. , 0.97]]]最终求均值后得出的结果如下:
[[0. , 0. , 0. , 0. , 0. , 0.22, 0. , 0.16, 0. , 0.62]]